Mini 6 ist ein kleiner 6 beine Roboter. Es war ein Prototyp für « parallel » bewegung test.
Das Ziel ist eien gerade lauf zu bekommen (es kann natürlich in alle Richtungen laufen)
kleines Video :
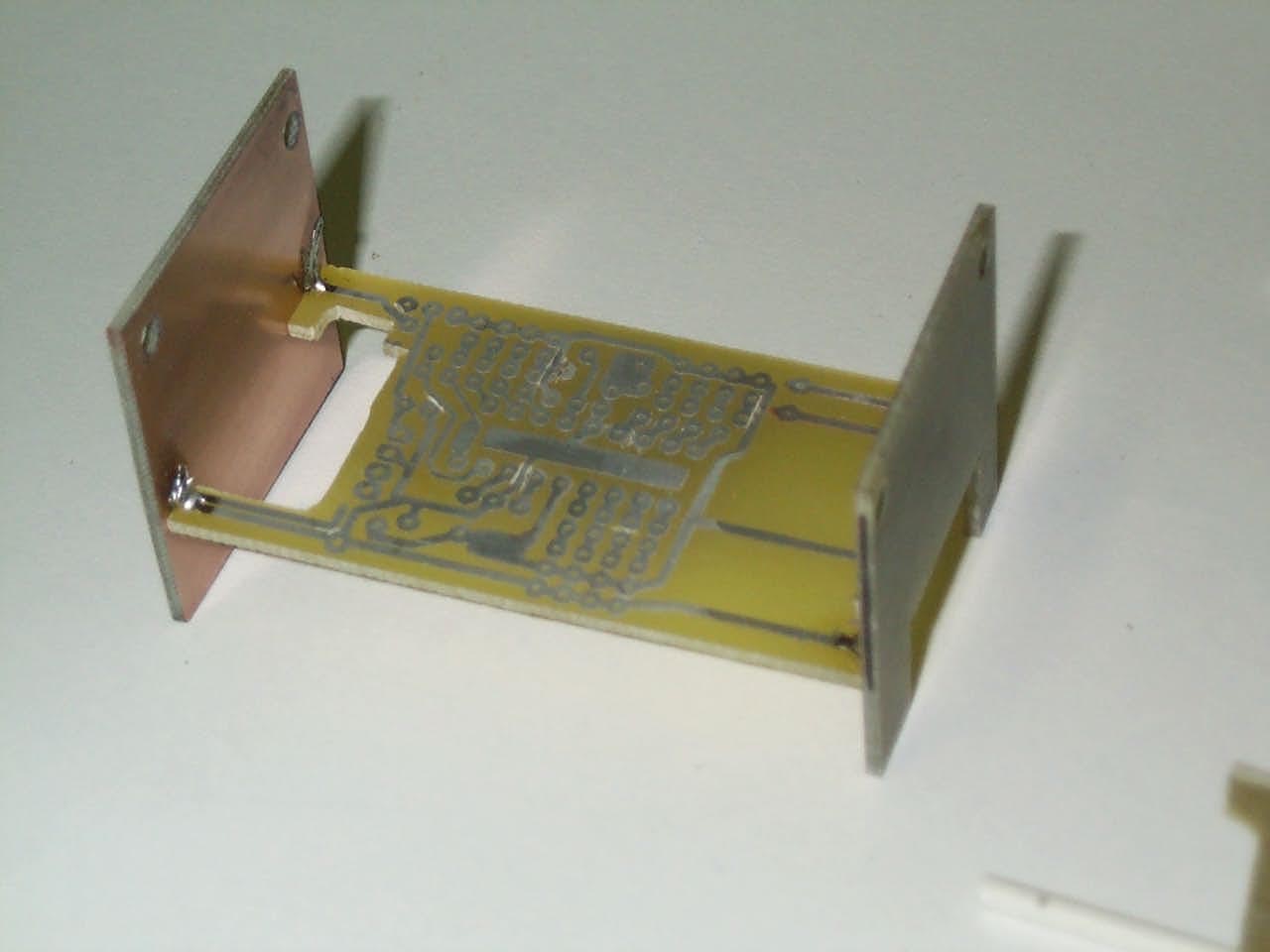
Rahmen ist nur in 3 teilen zusamen gelötet gemacht
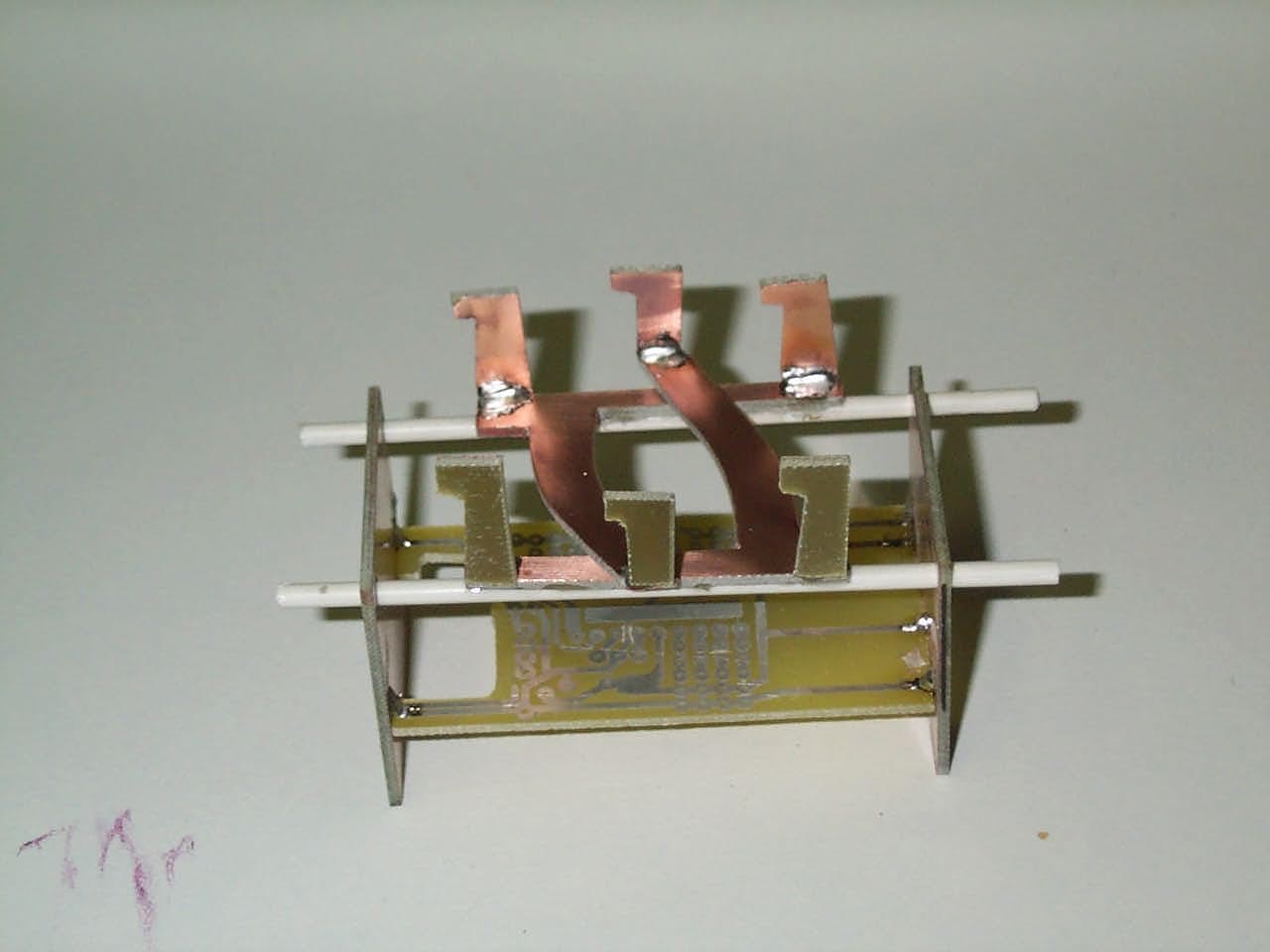
Schiebe Stangen trägen 3 Füssen jede :
Der Fuss in der mitte gehört das Schiebestange von andere Seite.
Eine kleine Drehung diese Zang druck der mittlere fuss am boden und bringt nach oben das gegenseite der Roboter.

Schiebe Stangen mit füss sind in der Rahmen eingelegt VOR die letzte Teile der Rahmen zu löten.
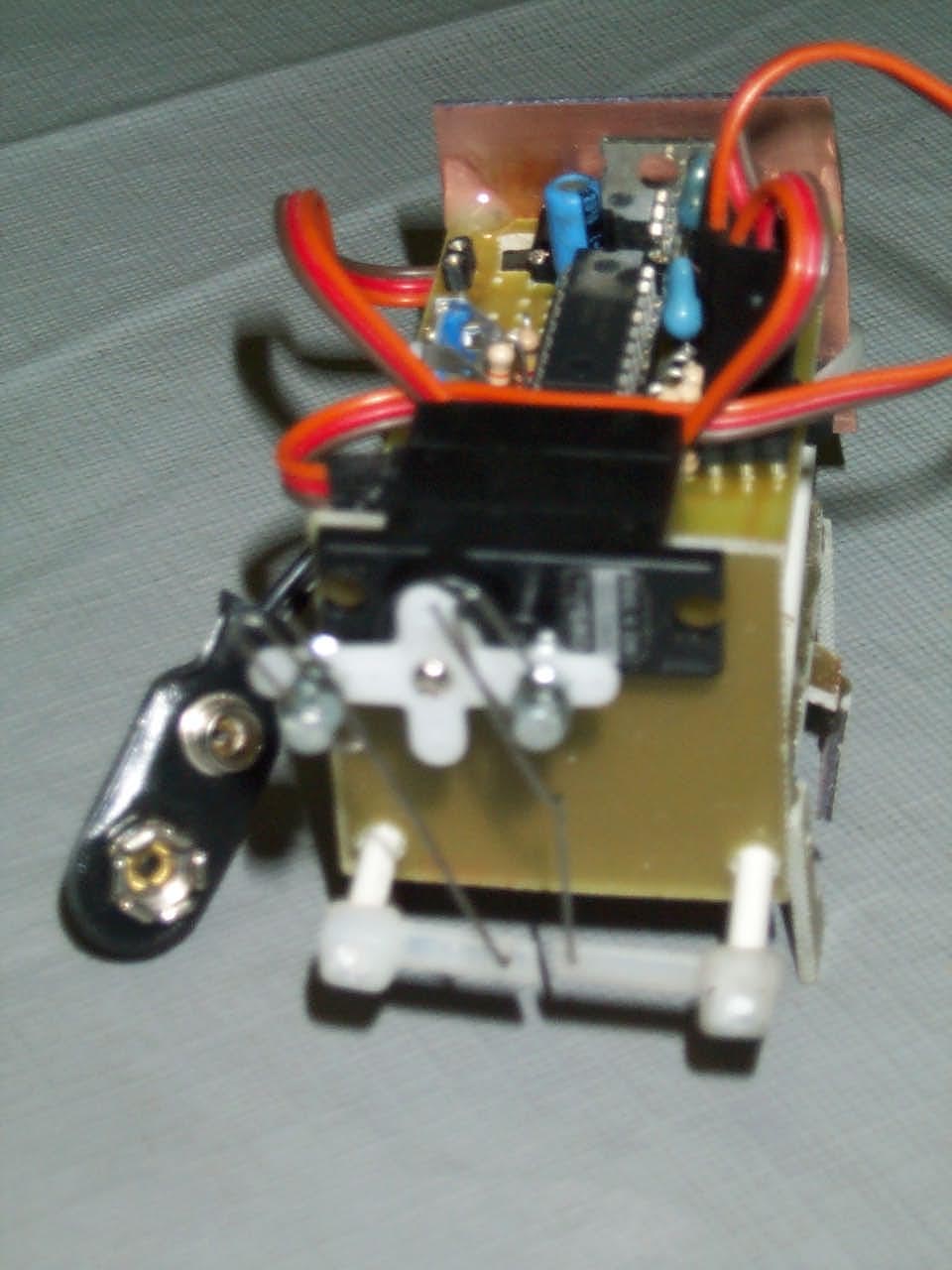
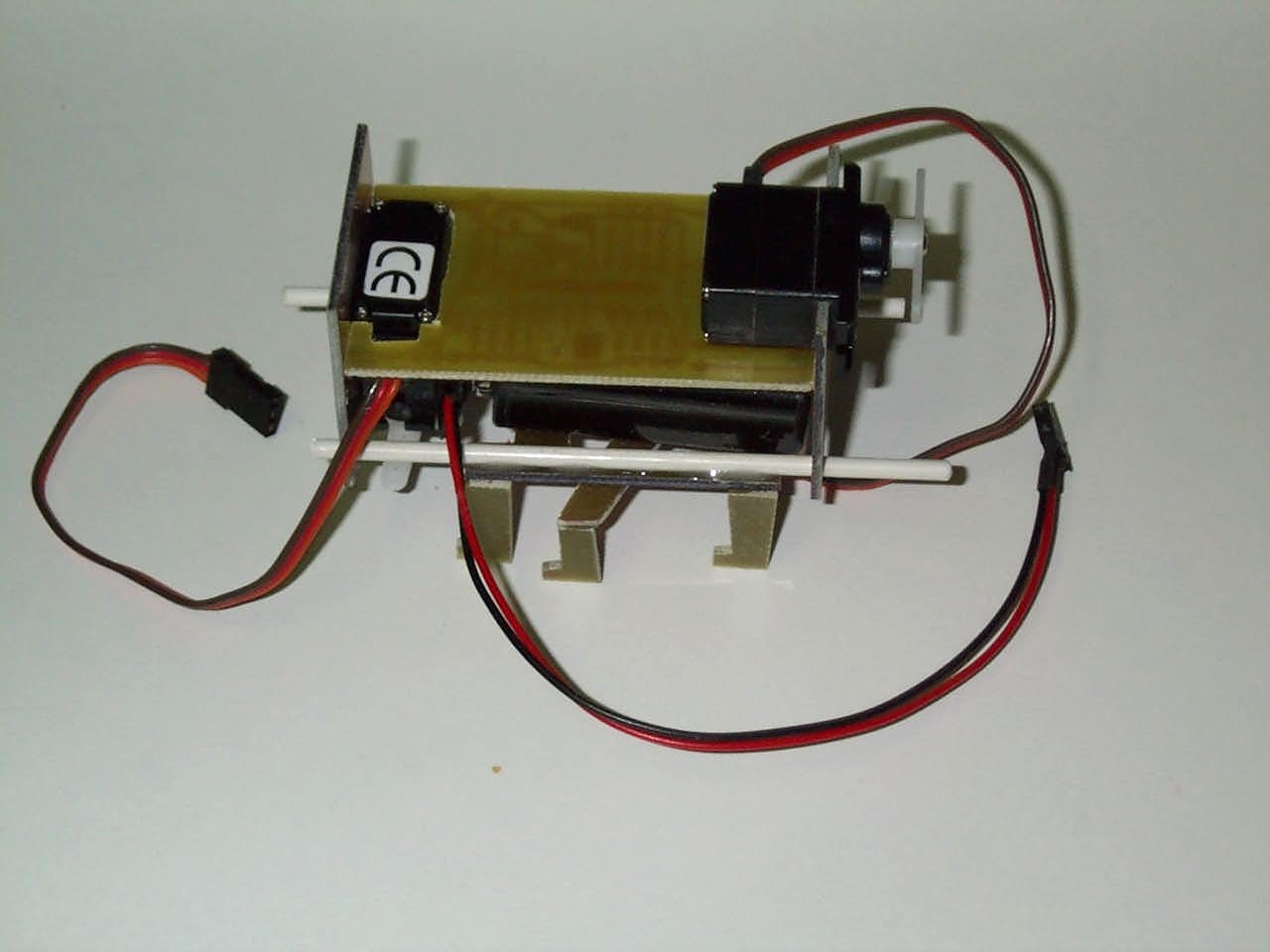
Komplett Roboter
Accu steht über die Beine
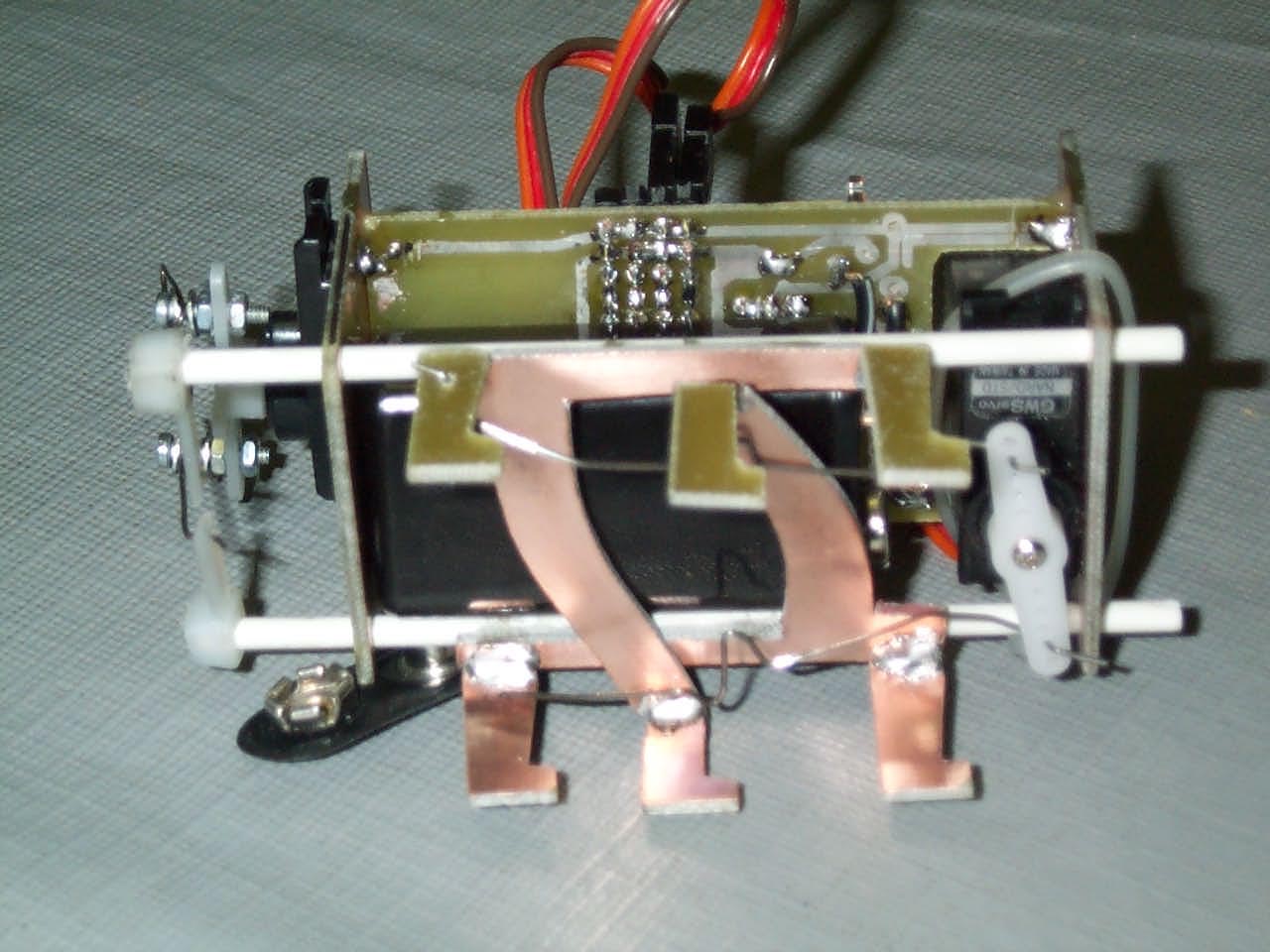
9v batterie klemmung gibt idee die gesamt grösse !