Vue
d'ensemble de l'appareil.
Sa taille (14 X 8 X 3,5 cm) en fait quelque chose de très facile à transporter.
Ici a sélection du mode de fonctionnement de
la voie 4 utilisée soit en entrée analogique, soit
en récepteur infra-rouge.

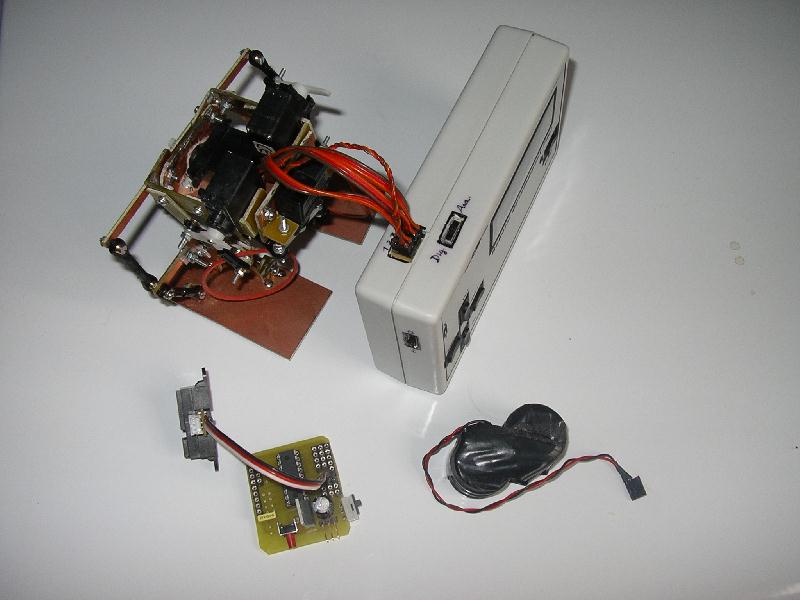
Branchement typique :
Les servomoteurs du Robot sont directement connectes à l'appareil.
Ce dernier leur fourni l'alimentation necessaire.
Menu typique de réglage de positionnement d'un servomoteur :
Ici : voie 2
Positionnement du servo à 150 (milieu)
Un appui sur la touche de validation envoie
un train d'impulsion aux 4 sorties en même temps, chacune d'elle pouvant avoir un paramètre de position diffférent.

Utilisation en récepteur de télécommande infra rouge (pas branché ici !).
Un code correspondant au signal est affiché. Ce code sera repris tel quel dans le programme du Robot.

Utilisation en analyseur de signal analogique :
Ici un capteur de distance analogique SHARP est contrôlé.
