Mini 6 is a little 6 legged Robot which was created to test a « linear » legs movment.
This way, the Robot is naturaly able to go on really straight line.
A little video of this little beast !
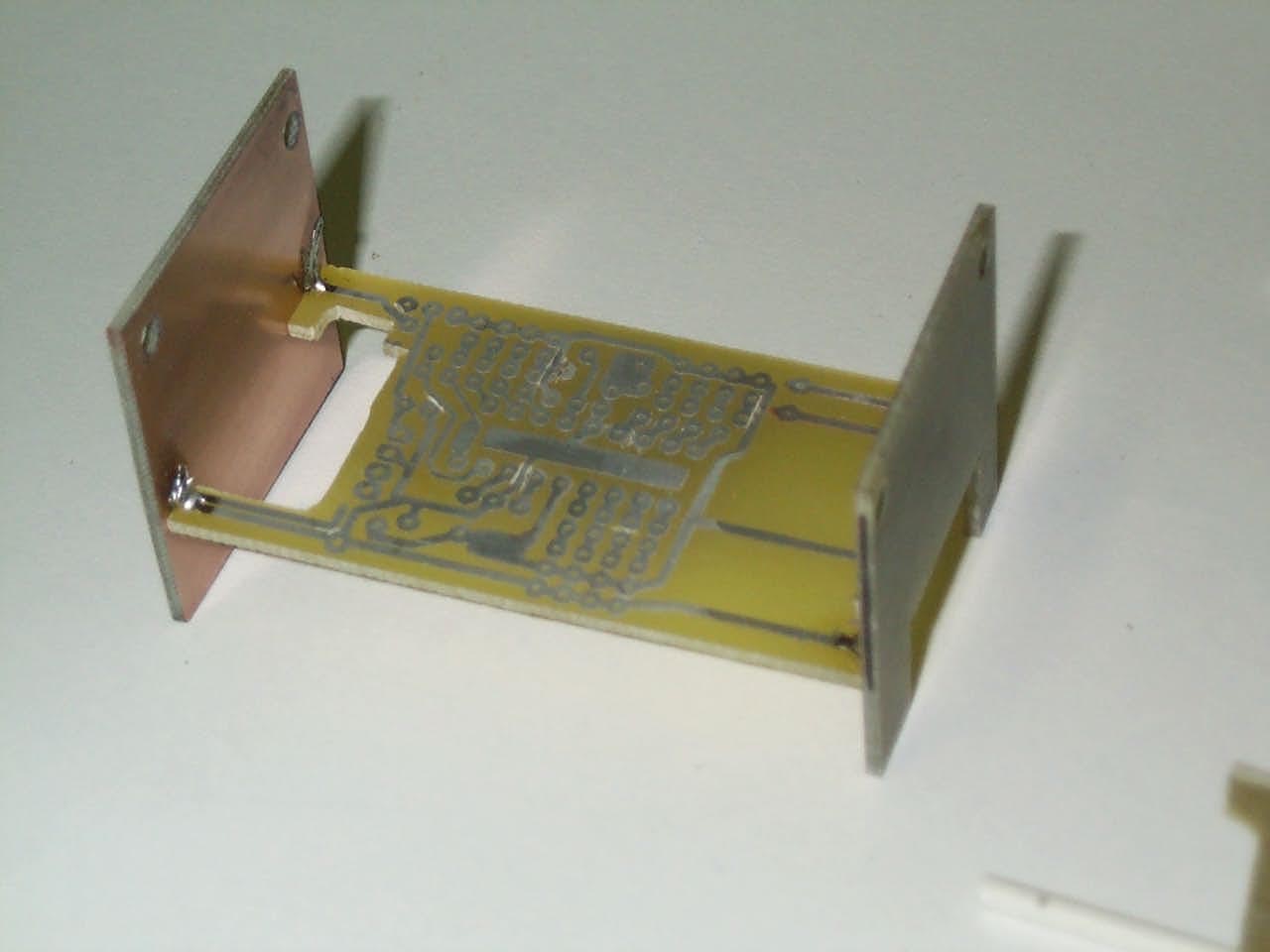
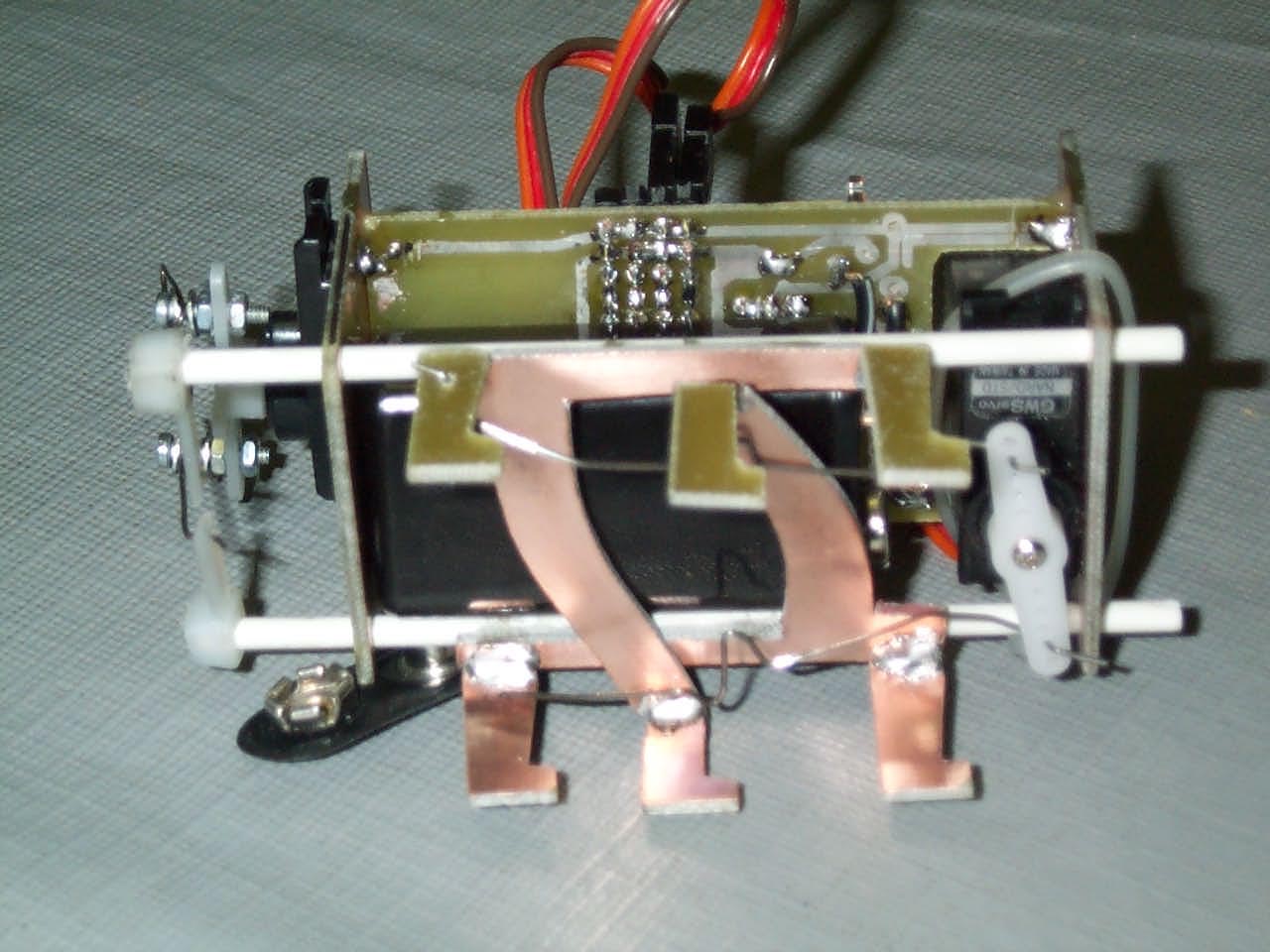
The print circuit is the ground frame of the Robot.
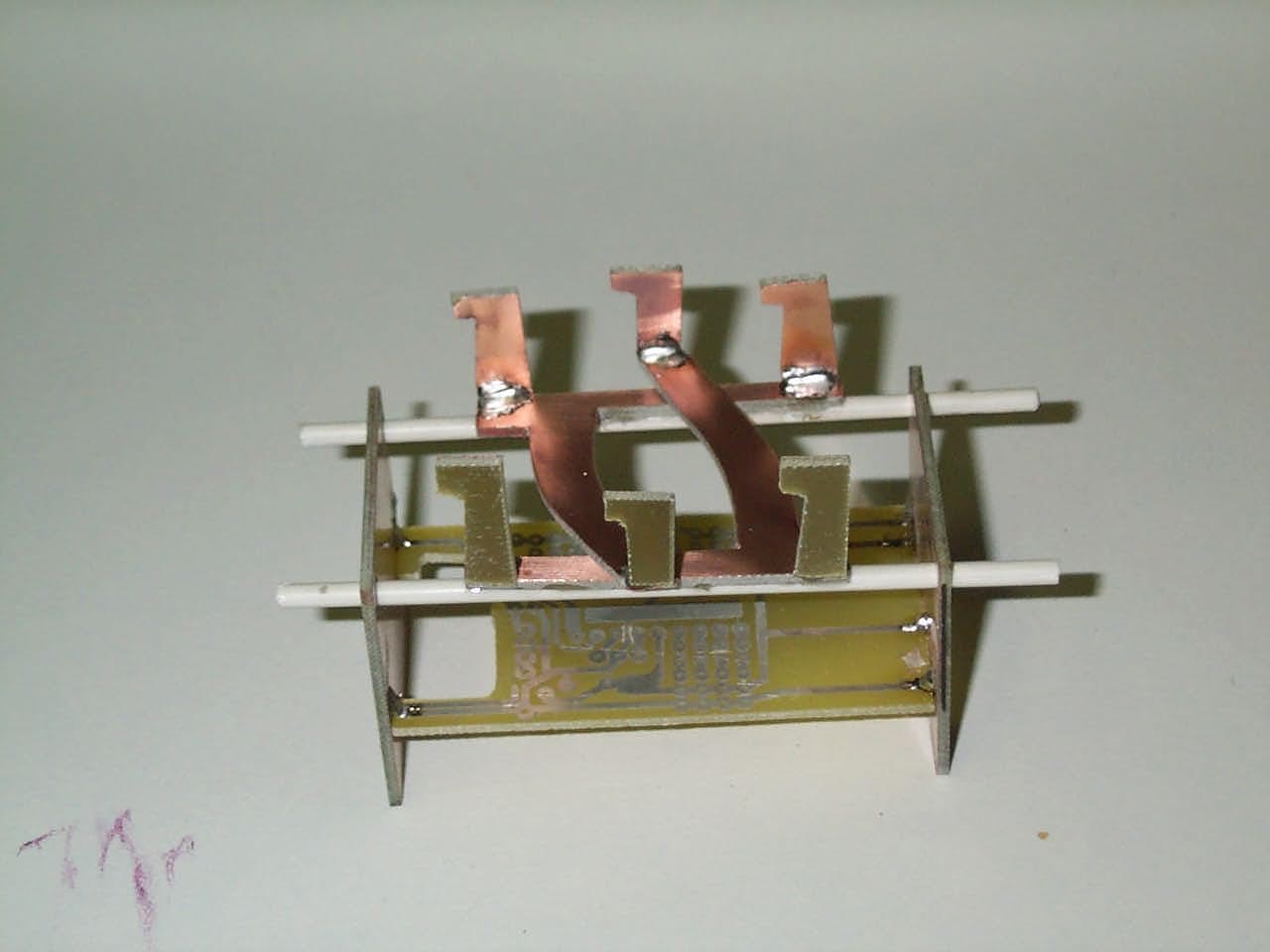
Both sticks on fiberglass are supporting 3 legs :
Both front and back of that side plus the middle one of the opposite side.
Both middle feets are crossing each other under the Robot.
A slight pivoting movement of the stick raise or lower the opposed middle feet/

Both sticks + Legs are inserted between both end panels of the body..
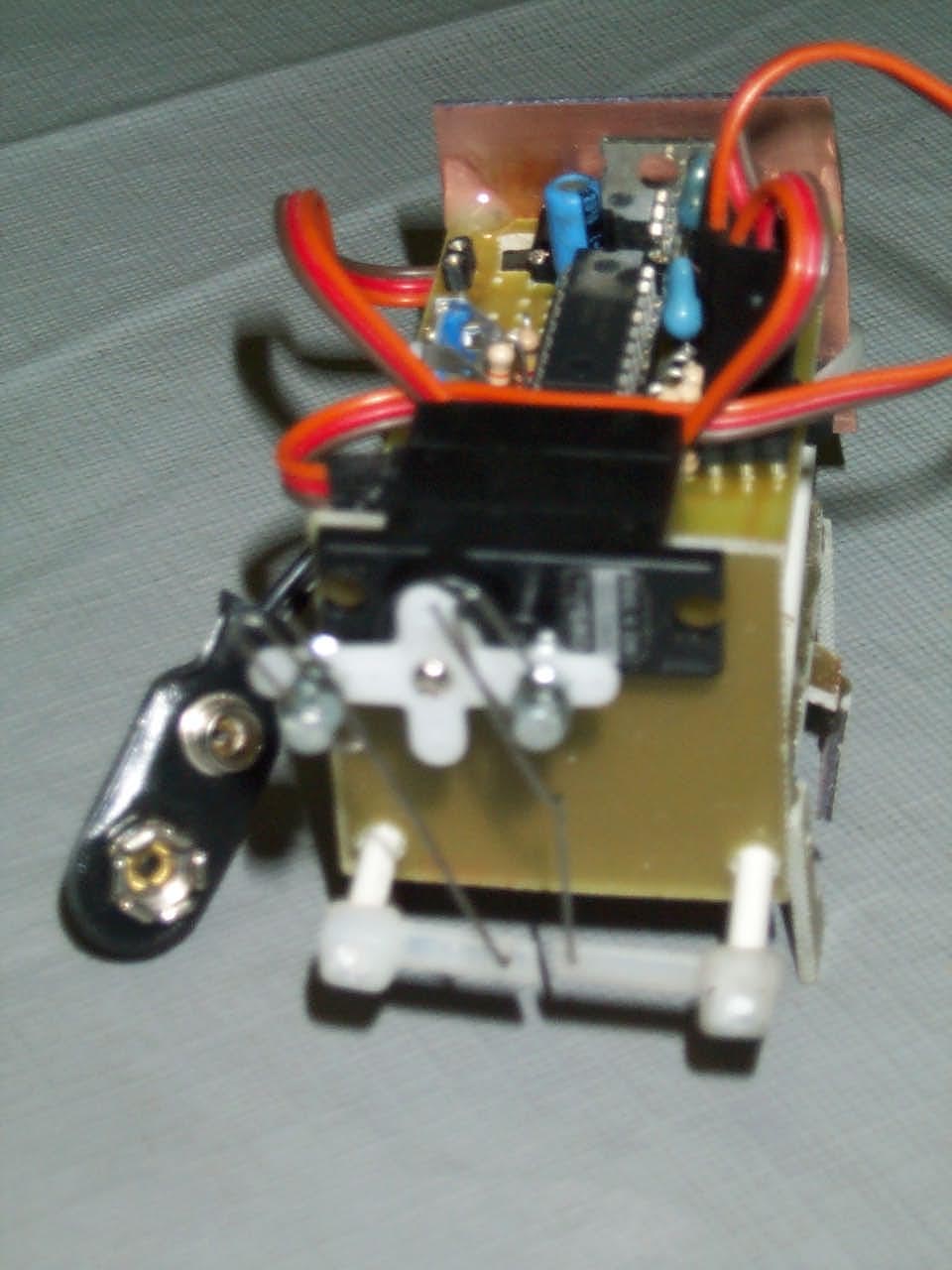
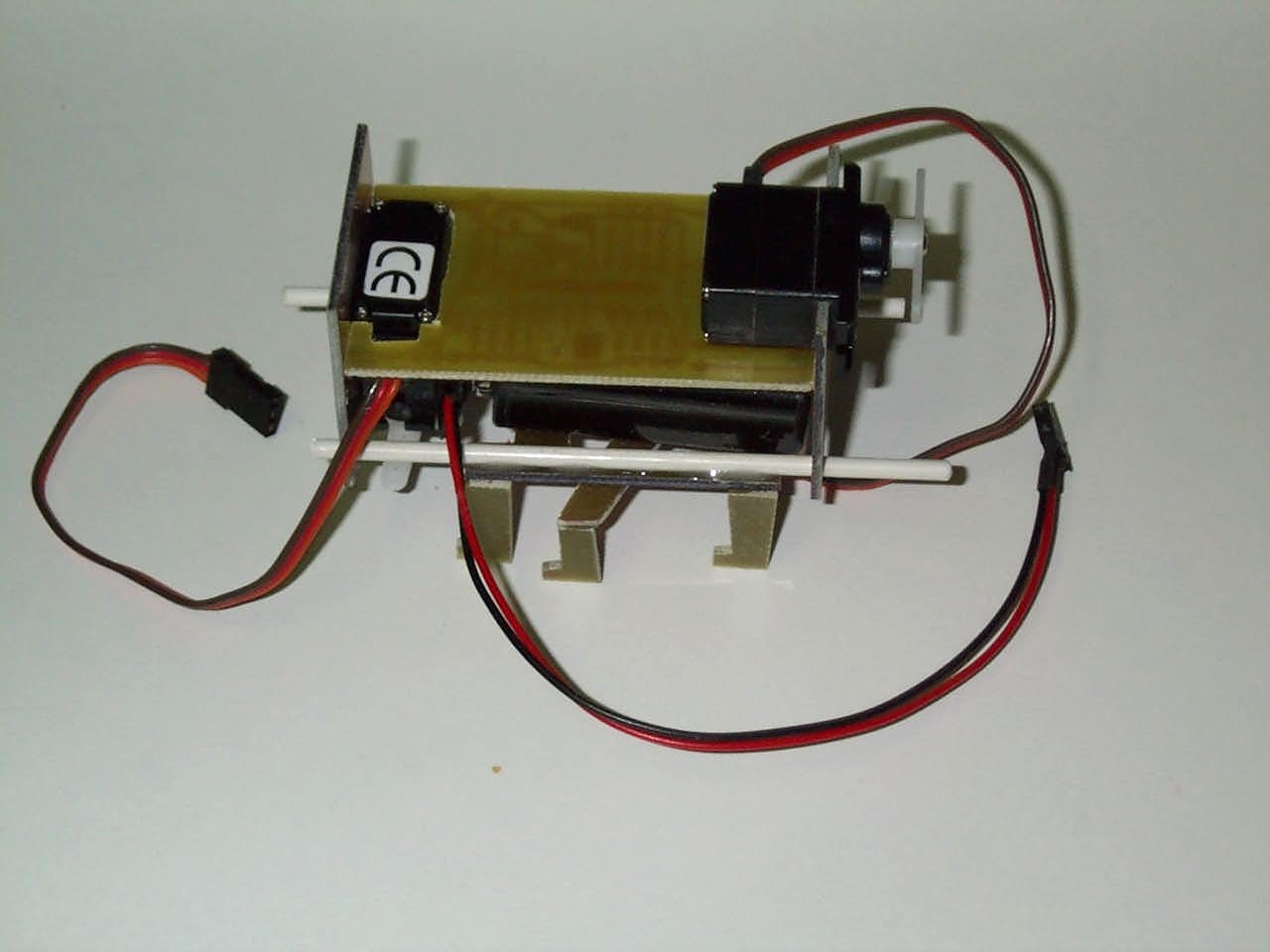
The complet robot.
The 9v rechargeable battery is located between the legs and the body !
Note the rod connecting the drive servo to both rear legs.
View from the back !
You can see the servo rods and lever of the pivoting legs mechanism.
Just have a look at the size of the 9v battery connector !