Mini 6 est un petit robot à 6 pattes qui a été créé pour tester un mouvement « linéaire » des pattes.
Le but étant d'avoir un robot se déplaçant naturellement le plus droit possible
Petite vidéo (d'époque) :
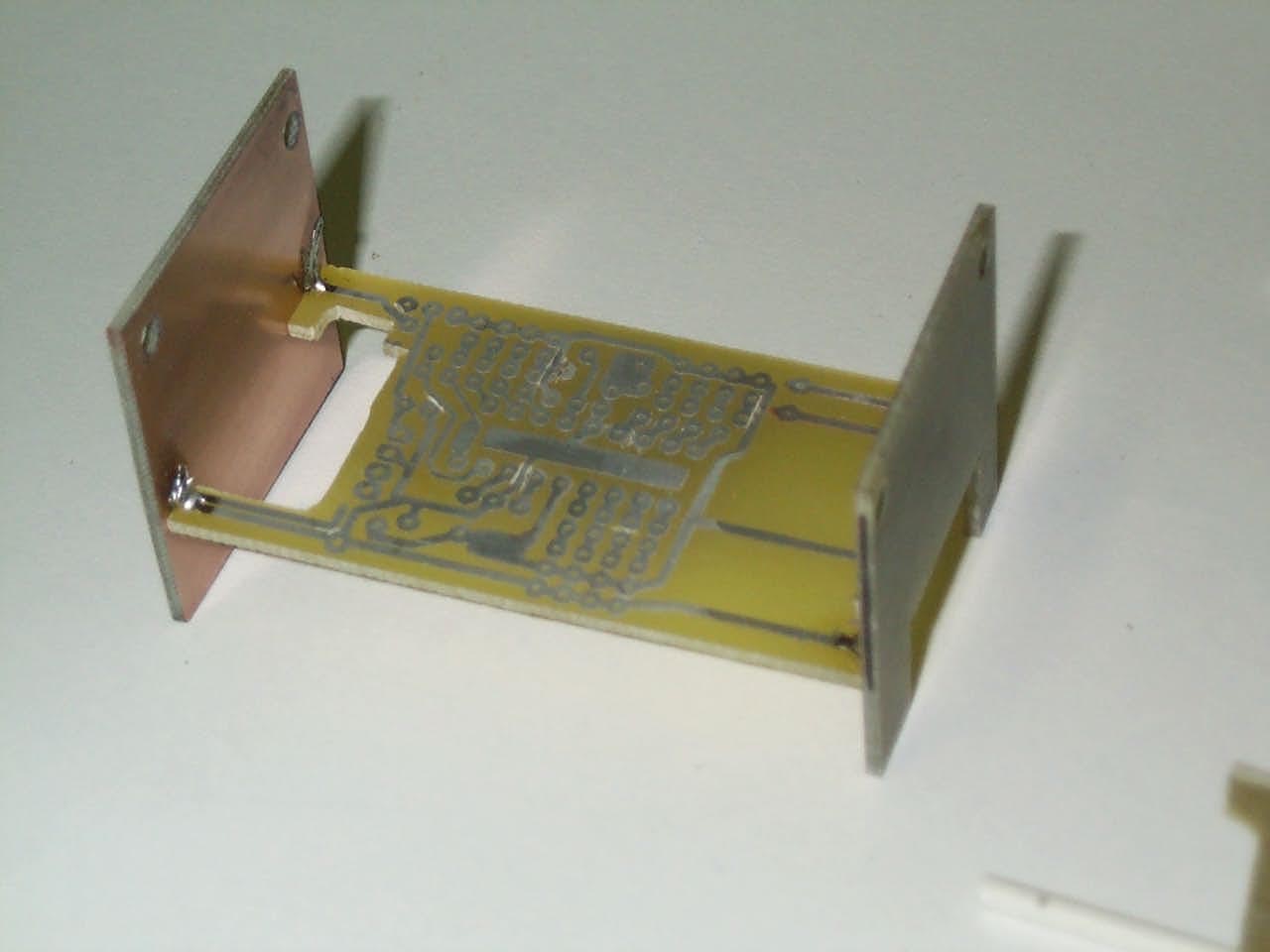
Le circuit imprimé fait partie intégrante du châssis (3 pièces seulement)
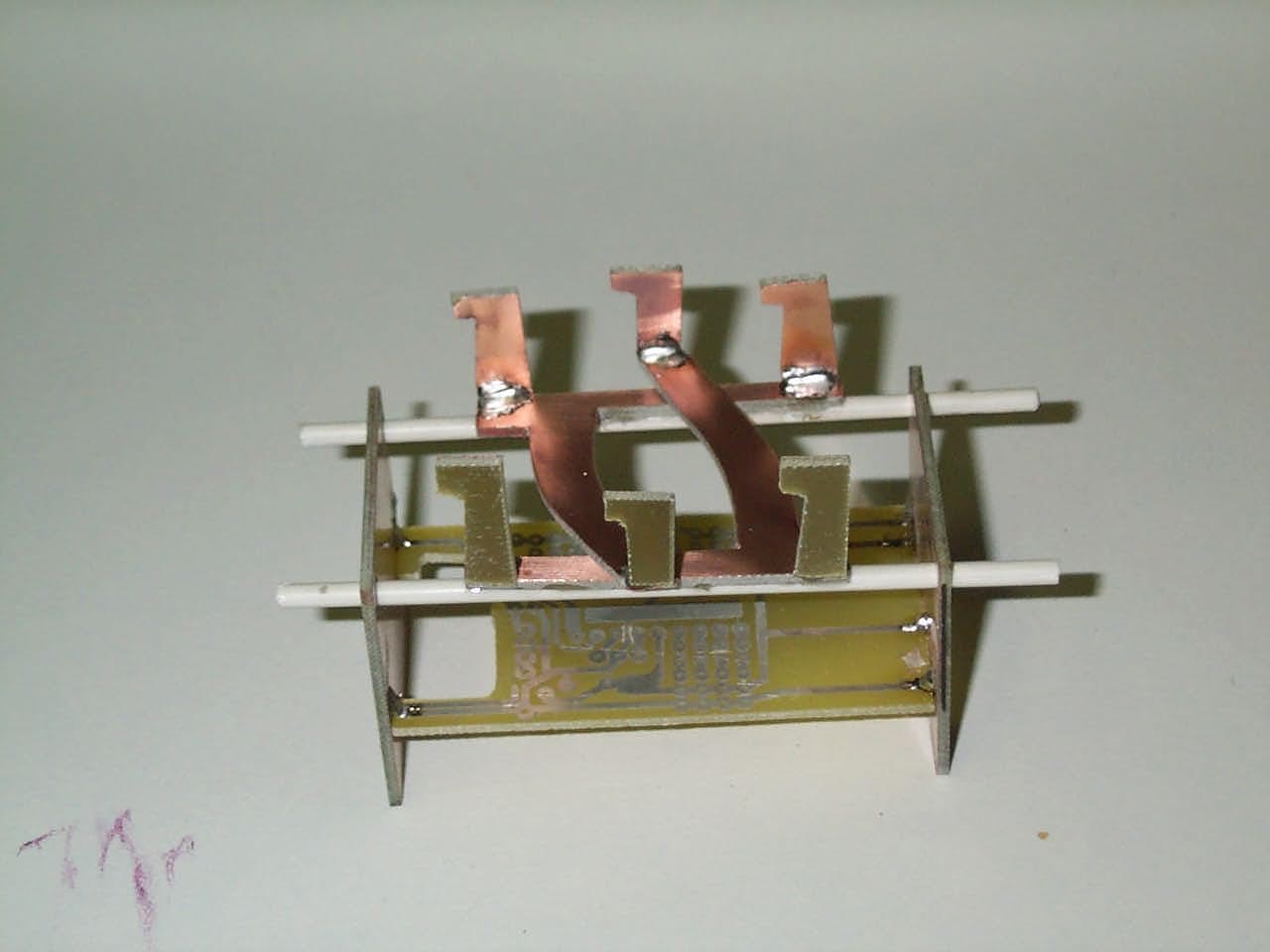
Les tiges en matériaux composite comportent 3 pattes chacune :
Les 2 extrêmes du même coté et la patte médiane du coté opposé.
Le pattes médianes se croisent donc sous le châssis du Robot.
Une légère rotation de la tige bascule la patte médiane du coté opposé, soulevant le robot.

Les tiges avec les pattes sont insérées entre les faces avant et arrières du chassis AVANT leur soudure.
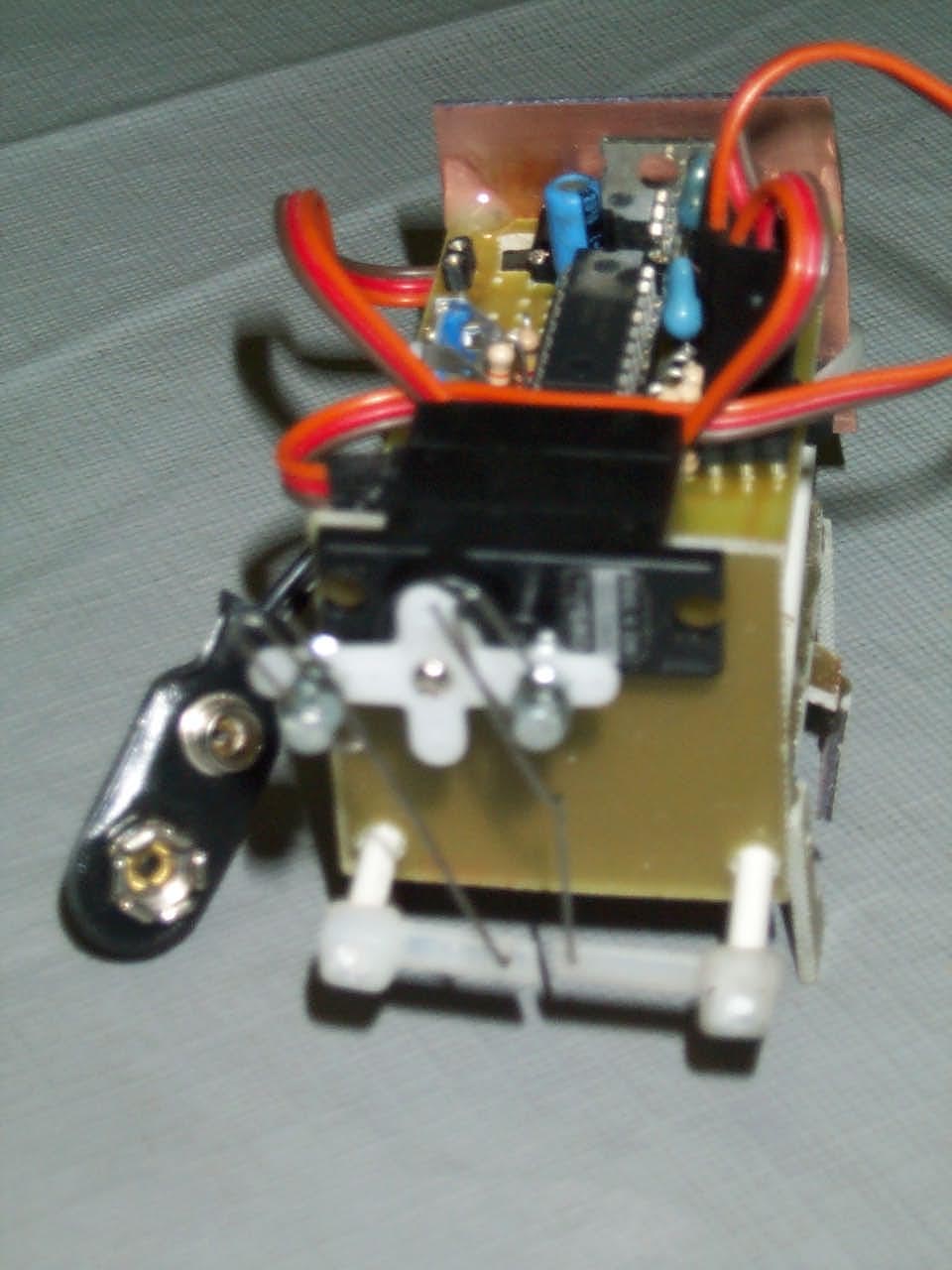
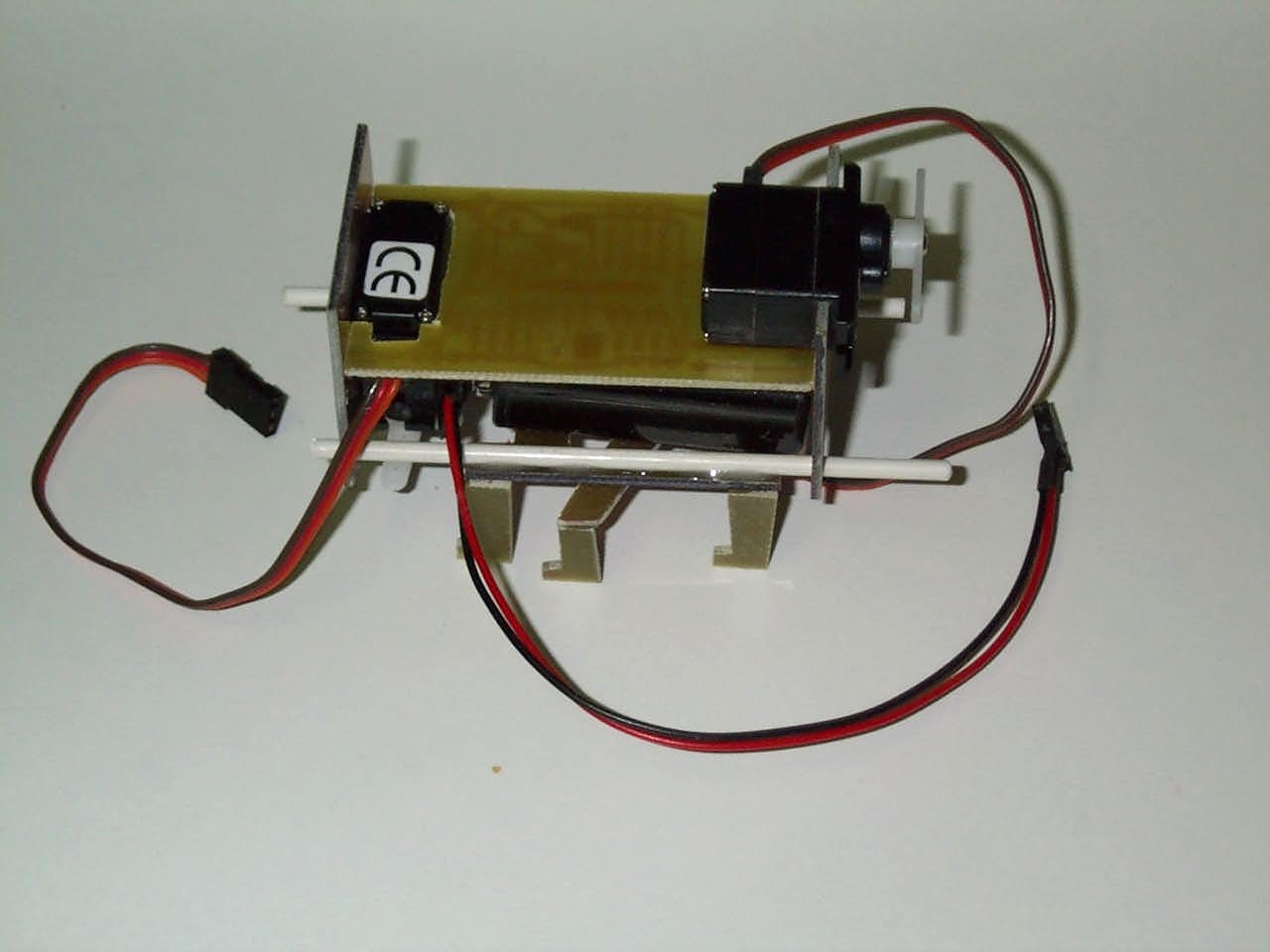
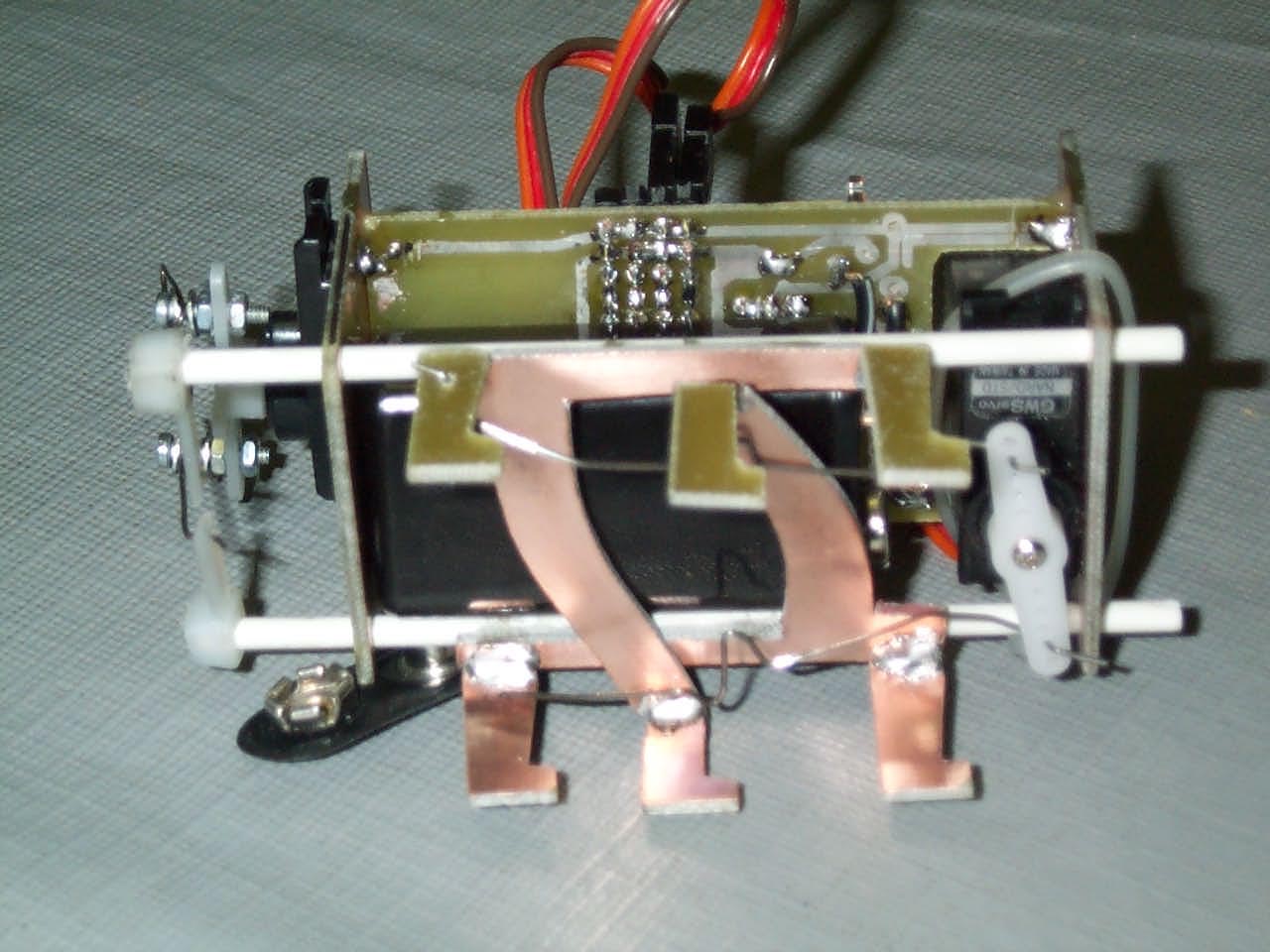
L'ensemble du robot monté.
La pile rechargeable de trouve entre les pattes et le châssis !
Notez les tringles reliant les pattes arrières au servomoteur de traction.
Vue de l'arrière ou on peut voir la commande de rotation des tiges !
Notez la taille du connecteur pour la pile 9v !