General
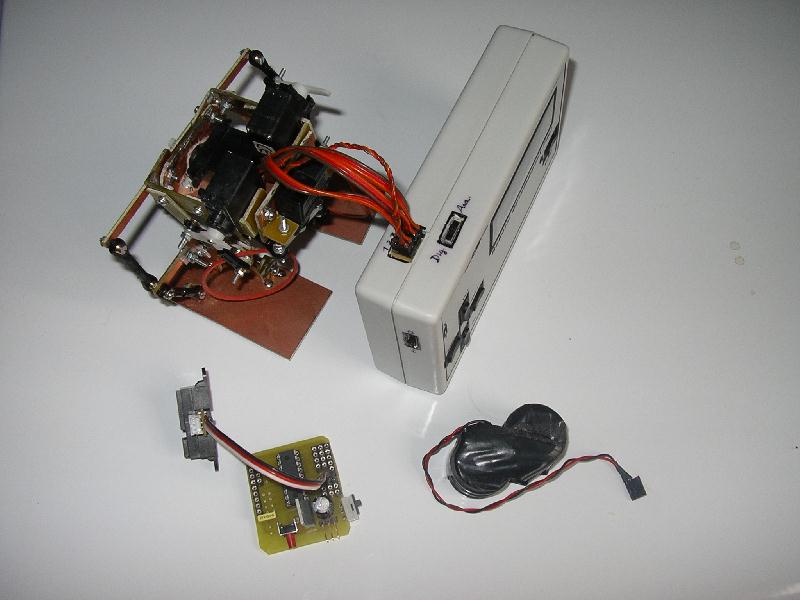
view of the beast !.
It's small (14 X 8 X 3,5 cm) and really easy to carry everywhere.
This screen show the selection between reading an
anlog voltage or decoding an infrared code through the port 4.

Typical application :
4 servos of the Robot are connected directly to the RDT .
The internal rechargeable Ni-cad battery give them the power supply.
Adjusting the poition of a servo :
Here, Port 2. (alias servo 2)
Positioning in middle (value = 150)
A press on the « Valid » key, send the pulse to the fourth Port at hte same time.
All of them can have a different position value.

Menu for decoding an infrared signal from a remote control.
By pluging an infrared sensor to the Port 4, the beam is decoded and a value is displayed. this value is used for programming the microcontroller of the robot.

Reading an Analog signal :
for exemple, distance mesuring sensor SHARP, plug to Port 4.
